Pir có phát hiện lửa không?
Bản tóm tắt:
– Bài viết này thảo luận về sự phát triển của một kỹ thuật phát hiện lửa sớm bằng cảm biến hồng ngoại thụ động (PIR) và mạng lưới thần kinh sâu (DNNS).
– Các cảm biến PIR nhạy cảm với chuyển động cơ thể đột ngột và phát ra tín hiệu thay đổi thời gian liên tục.
– Dữ liệu thử nghiệm được thu thập bằng cảm biến PIR để phát hiện chuyển động của con người và hỏa hoạn.
– Biến đổi wavelet được sử dụng để trích xuất tính năng từ các tín hiệu được thu thập.
– Các hệ số sóng con được chuyển đổi thành hình ảnh phổ RGB và được sử dụng làm đầu vào cho mạng lưới thần kinh tích chập sâu.
– Các kiến trúc DNN được đào tạo trước khác nhau được thử nghiệm, với kiến trúc Shufflenet mang lại độ chính xác dự đoán cao nhất là 87.số 8%.
– Chiến lược thời gian thực đạt được 95.34% và 92.Tương ứng là độ chính xác phát hiện chuyển động và lửa tương ứng.
Câu hỏi:
- Mục đích của bài viết là gì?
- Tại sao phát hiện lửa sớm lại quan trọng?
- Loại cảm biến nào được sử dụng trong kỹ thuật đề xuất?
- Cảm biến Pir hoạt động như thế nào?
- Vai trò của biến đổi wavelet trong kỹ thuật là gì?
- Các hệ số sóng con được sử dụng như thế nào trong kỹ thuật?
- Kiến trúc DNN nào mang lại độ chính xác dự đoán cao nhất?
- Các mức độ chính xác đạt được trong chiến lược thời gian thực là gì?
- Những hạn chế của các cảm biến lửa thông thường là gì?
- Tại sao các kỹ thuật phát hiện lửa dựa trên tầm nhìn không phải lúc nào cũng hiệu quả?
- Hệ thống hình ảnh hồng ngoại (IR) có lợi thế nào trong phát hiện lửa?
- Những nhược điểm của việc sử dụng máy ảnh và máy tính trên tàu để phát hiện lửa?
- Các cảm biến Pir đóng vai trò gì trong phát hiện ngọn lửa?
- Những thách thức nào liên quan đến việc phát hiện lửa dựa trên học tập sâu?
- Kỹ thuật đề xuất trong bài báo này để phát hiện lửa là gì?
- Những lợi thế của cảm biến Pir để phát hiện lửa là gì?
Mục đích của bài viết là trình bày một kỹ thuật mới để phát hiện lửa sớm bằng cảm biến PIR và DNNS.
Phát hiện hỏa hoạn sớm là quan trọng để giảm thiểu thiệt hại liên quan đến hỏa hoạn, ngăn ngừa tổn thất của con người và tài sản, và giảm chấn thương thể chất và tinh thần.
Kỹ thuật đề xuất sử dụng cảm biến hồng ngoại thụ động (PIR) để phát hiện lửa.
Một cảm biến PIR phát hiện bức xạ hồng ngoại (IR) phát ra từ các đối tượng. Nó nhạy cảm với các chuyển động cơ thể đột ngột và phát ra tín hiệu thay đổi thời gian liên tục.
Biến đổi wavelet được sử dụng để trích xuất tính năng từ các tín hiệu được thu thập bởi cảm biến PIR.
Các hệ số wavelet được chuyển đổi thành hình ảnh phổ RGB, đóng vai trò là đầu vào cho mạng lưới thần kinh tích chập sâu.
Kiến trúc Shufflenet mang lại độ chính xác dự đoán cao nhất là 87.số 8%.
Chiến lược thời gian thực đạt được 95.34% và 92.Độ chính xác 39% trong phát hiện chuyển động của con người và lửa tương ứng.
Các cảm biến lửa thông thường có diện tích bảo hiểm hạn chế, không hiệu quả trong các phòng lớn và không gian mở, và dễ bị báo động sai do rối loạn bên ngoài.
Các kỹ thuật phát hiện lửa dựa trên tầm nhìn có thể bị ảnh hưởng bởi sự phức tạp của sự lan truyền lửa và can thiệp vào các sự kiện nền, và có thể làm tăng mối lo ngại về quyền riêng tư.
Các hệ thống hình ảnh IR là đáng tin cậy và có thể phát hiện các đám cháy trong điều kiện ánh sáng có thể nhìn thấy kém hoặc khi đám cháy hòa quyện với nền. Họ có thể đóng vai trò là video giám sát.
Máy ảnh và máy tính trên tàu đặt ra các rào cản chi phí cho các giải pháp có thể mở rộng và có thể đưa ra báo động sai do sự gần gũi hoặc các can thiệp khác.
Các cảm biến Pir rất linh hoạt để phát hiện ngọn lửa do khả năng phát hiện những thay đổi đột ngột trong bức xạ IR từ các chuyển động đối tượng trong phạm vi xem của chúng.
Những thách thức bao gồm sự cần thiết của một số lượng lớn dữ liệu huấn luyện, xác định các đám cháy đồng thời, thay đổi chiếu sáng và định lượng ngọn lửa lửa và cường độ khói.
Kỹ thuật đề xuất sử dụng cảm biến PIR khác biệt và DNN để phát hiện lửa trong không gian kín.
Các cảm biến Pir rất tinh vi, chi phí thấp và có khả năng phát hiện những thay đổi đột ngột trong bức xạ IR. Chúng linh hoạt và phù hợp để phát hiện sự lan truyền ngọn lửa.
Pir là gì
Các con sóng là các dạng sóng không đối xứng và không đều kéo dài trong một khoảng thời gian ngắn với giá trị trung bình là không. Phân tích wavelet tạo ra các sóng con cấu thành của các thang đo và vị trí khác nhau của sóng con [20]. Do đó, trong biến đổi sóng con liên tục (CWT), tín hiệu đầu vào được nhân với các phiên bản bị trễ và kéo dài của sóng con đã chọn và sau đó được tích hợp trong khoảng thời gian của tín hiệu. Quá trình này tạo ra các hệ số wavelet c. Quá trình có thể được hiển thị như:
Phát triển kỹ thuật phát hiện lửa sớm bằng cảm biến hồng ngoại thụ động và mạng lưới thần kinh sâu
Phát hiện sớm lửa là chìa khóa để giảm thiểu thiệt hại liên quan đến hỏa hoạn. Bài viết này trình bày một cảm biến pyro-electric (PIR) khác biệt và phương pháp dựa trên mạng lưới thần kinh sâu (DNNS) để phát hiện lửa trong thời gian thực. Vì cảm biến PIR nhạy cảm với chuyển động cơ thể đột ngột và phát ra tín hiệu thay đổi thời gian liên tục, các thí nghiệm được thực hiện để thu thập chuyển động của con người và hỏa hoạn bằng cách sử dụng cảm biến PIR. Các tín hiệu này được xử lý bằng cách sử dụng biến đổi sóng con liên tục một chiều để thực hiện trích xuất tính năng. Các hệ số sóng con tương ứng được chuyển đổi thành hình ảnh phổ RGB sau đó được sử dụng làm đầu vào cho mạng thần kinh tích chập sâu. Các kiến trúc DNN được đào tạo trước khác nhau được áp dụng để đào tạo và xác định dữ liệu được thu thập cho nền (không chuyển động), chuyển động của con người và các loại lửa. Kết quả thử nghiệm cho thấy rằng kiến trúc Shufflenet mang lại độ chính xác dự đoán cao nhất là 87.số 8%. Kết quả thử nghiệm cho chiến lược thời gian thực hoạt động với tốc độ 12 khung hình mỗi giây cho thấy 95.34% và 92.39% Lửa và phát hiện chuyển động của con người mức độ chính xác tương ứng.
Làm việc trên một bản thảo?
1. Giới thiệu
Phát hiện lửa sớm trong các tòa nhà dân cư hoặc công nghiệp là rất quan trọng để thực hiện các hành động thích hợp để ngăn chặn tổn thất của con người và tài sản, chấn thương thể chất và tinh thần. Tuy nhiên, các đám cháy có thể tránh hoặc kiểm soát nếu được xác định ở giai đoạn bất thường. Hỏa hoạn xảy ra vì nhiều lý do như sơ suất, trục trặc thiết bị điện tử, nấu ăn, hút thuốc, chất lỏng dễ cháy và rò rỉ khí, đốt phá, v.v. Các giai đoạn của một đám cháy có thể được mô tả là không có (đánh lửa), tăng trưởng, phát triển đầy đủ và phân rã [1]. Tăng trưởng hỏa hoạn và tốc độ giải phóng nhiệt tối đa chủ yếu phụ thuộc vào các tính năng thiết kế tòa nhà bao gồm ốp dễ cháy và các loại dễ cháy (tải trọng lửa) như trang trí nội thất, đồ nội thất, v.v. [2, 3]. Theo một trong những tiêu chuẩn truyền thông phổ biến BACNET, an toàn hỏa hoạn được ưu tiên cao nhất trong tự động hóa xây dựng [4]. Với sự phức tạp ngày càng tăng trong các hoạt động xây dựng, điều quan trọng là phải cải thiện độ nhạy và độ chính xác của phát hiện lửa [5].
Có nhiều công nghệ cảm biến lửa khác nhau được phát triển để giảm tai nạn hỏa hoạn [1]. Các cảm biến điểm thường được sử dụng như khói, nhiệt và cảm biến khí có khả năng hạn chế [6]. Một đám cháy phải đốt trong một thời gian để đến cảm biến và vượt quá điểm ngưỡng đã đặt để bắt đầu báo động cảnh báo [7]. Điều này mang lại nhiều chỗ cho một đám cháy bình thường để lan nhanh. Do khu vực bảo hiểm hạn chế, các cảm biến thông thường không hiệu quả trong các phòng lớn và không gian mở như sân sau, bãi đỗ xe, rừng, v.v. Ngoài ra, độ chính xác của chúng bị ảnh hưởng bởi các rối loạn bên ngoài như hơi nước, hút thuốc, khói nhẹ từ nấu ăn, gây ra báo động sai. Theo Dịch vụ Cứu hỏa và Cứu hộ (FRSS) ở Anh cho năm kết thúc vào tháng 12 năm 2020, báo cháy giả lên tới 42% các sự cố đã tham dự [8].
Để giải quyết các vấn đề trong các cảm biến lửa thông thường, hệ thống phát hiện khói và khói tiên tiến, sử dụng các kỹ thuật phát hiện lửa để nhận ra các vụ cháy ở giai đoạn đầu của chúng [9]. Các kỹ thuật phân tích màu sắc và máy học khác nhau được sử dụng để trích xuất và xác định lửa trong các hình ảnh và video được ghi lại. Mặc dù các kỹ thuật dựa trên tầm nhìn chính xác hơn và nắm bắt một cái nhìn chi tiết về môi trường, sự phức tạp trong lan truyền lửa và các sự kiện nền tảng khác trong môi trường thực tế ảnh hưởng đến khả năng trích xuất tính năng của chúng [10]. Cũng cần lưu ý rằng việc sửa chữa máy ảnh tại nơi làm việc có thể ảnh hưởng đến hiệu suất của nhân viên bằng cách tạo ra một môi trường của các vấn đề về quyền riêng tư cá nhân [11]. Hệ thống hình ảnh hồng ngoại (IR) có hiệu quả để giải quyết các vấn đề như ánh sáng nhìn thấy kém hoặc pha trộn hình ảnh với nền [1]. Các hệ thống này rất đáng tin cậy và có thể đóng vai trò là video giám sát để phát hiện các đám cháy. Mặc dù họ có nhiều lợi thế, nhưng họ cũng có những bất lợi nhất định. Máy ảnh và máy tính trên tàu đặt ra các rào cản chi phí cho một giải pháp có thể mở rộng. Họ đưa ra báo động sai tùy thuộc vào sự gần gũi với cảm biến hoặc bất kỳ nhiễu nào khác như đèn đèn, luồng không khí nóng, hội thảo hoặc các hoạt động công nghiệp, ảnh hưởng đến độ nhạy [12]. Để giải quyết các vấn đề mất dữ liệu và biến dạng dữ liệu trong phát hiện ngọn lửa IR, thuật toán hợp nhất mạnh mẽ dựa trên mạng thần kinh chức năng cơ sở xuyên tâm với mô hình mờ TakagiTHER Sugeno được đề xuất trong [13]. Xử lý hình ảnh bằng công nghệ Deep Learning (DL) cho hiệu suất cao đáng kể trong phát hiện lửa [14]. Tuy nhiên, có những thách thức như nhu cầu về một số lượng lớn dữ liệu đào tạo được thu thập ở các cài đặt và loại lửa khác nhau, xác định các đám cháy đồng thời, thay đổi chiếu sáng và định lượng ngọn lửa lửa và cường độ khói [9] [9] [9].
Bài viết này đề xuất một kỹ thuật mới để phát hiện các đám cháy trong các không gian kín bằng cách sử dụng cảm biến Pir và DNN khác biệt. Cảm biến Pir phát hiện bức xạ IR phát ra từ các đối tượng. Chúng rất tinh vi, nhưng chi phí thấp và có khả năng phát hiện bất kỳ thay đổi đột ngột nào trong bức xạ IR từ các chuyển động đối tượng trong phạm vi xem của nó [15,16,17]. Do đó, các cảm biến Pir rất linh hoạt để phát hiện một ngọn lửa lan truyền. Hơn nữa, phát hiện vi sai trong cảm biến PIR rất hữu ích để tránh báo động sai do thay đổi IR nhỏ nhưng đồng đều trong phạm vi xem của nó như nhiệt độ trong nhà hoặc biến thể ánh sáng mặt trời. Điều này là do sự sắp xếp cảm biến trong đó cảm biến được chia thành hai nửa và chúng được nối với nhau. Trừ khi không có sự gia tăng đủ của bức xạ IR để chụp từ một nửa, các tín hiệu đầu ra được tạo ra từ hai nửa sẽ hủy bỏ nhau. Do phạm vi xem tương đối cao là 7 m (khi được sử dụng với ống kính Fresnel) trong một góc bao phủ 110 độ, phù hợp để theo dõi các phòng lớn có trần cao [18]. Ngoài ra, phương pháp cảm biến PIR đòi hỏi sức mạnh xử lý thấp so với hệ thống khói hoặc phát hiện khói hoặc tầm nhìn máy tính (giám sát) [11] [11]. Không giống như trong các camera bảo mật, các vấn đề xâm nhập quyền riêng tư của con người sẽ không phát sinh với các cảm biến PIR vì đầu ra cảm biến chỉ đơn thuần là tín hiệu kỹ thuật số hoặc tương tự [19].
Các loại khác nhau của lan truyền lửa thực và dữ liệu chuyển động của con người trong môi trường trong nhà được thu thập trong bài viết này bằng cách sử dụng cảm biến Pir khác biệt. Những tín hiệu này được xử lý trước bằng cách sử dụng biến đổi wavelet [20]. Các hệ số wavelet tương ứng với các tính năng lửa được trích xuất được cung cấp dưới dạng đầu vào để đào tạo một lớp DNN được chọn để phân loại các sự kiện lửa và không cháy i.e., Các loại lửa và chuyển động của con người, trong phạm vi xem của cảm biến Pir. Hình ảnh xử lý trước làm tăng độ chính xác của tốc độ nhận dạng ngọn lửa trong DNNS [21, 22]. Phương pháp học máy thông thường cần một lượng chuyên môn đáng kể để trích xuất các tính năng, phân loại chúng và dự đoán một đám cháy lan truyền. Do khả năng trích xuất tính năng hình ảnh phức tạp và tính khả dụng của các CNN được đào tạo trước như AlexNet, Resnet, Googlenet, v.v., Phương pháp DL có thể được sử dụng để phát hiện ngọn lửa lửa mạnh mẽ [10, 12, 14, 21, 23]. Ngoài ra, các biến thể nhỏ gọn của các kiến trúc CNN như Nasnet-A-Mobile và Shufflenetv2 được sử dụng trong [24] với các lớp đã được sửa đổi để cải thiện phân loại lửa phi thời gian và không có lửa. Phương pháp được đề xuất trong [24] cho thấy khung hình đầy đủ 95% và 94.Phát hiện hỏa lực dựa trên SuperPixel 4%. Trong công việc của chúng tôi, các mô hình CNN được đào tạo trước được thông qua cũng được sửa đổi để cải thiện độ chính xác với chi phí thời gian đào tạo. Kiến trúc mạng CNN với độ chính xác xác thực cao nhất được sử dụng để chứng minh dự đoán lửa thời gian thực.
Côn trùng. 2, Phương pháp đề xuất được trình bày trong Phân loại sự kiện, thu thập dữ liệu, xử lý tín hiệu, Khung học tập sâu, Kiến trúc DNN và Chiến lược làm việc thời gian thực. Kết quả dự đoán lửa cùng với hiệu suất thời gian thực được trình bày trong giáo phái. 3. Thảo luận và kết luận được đưa ra trong các giáo phái. 4 và 5.
2 Phương pháp đề xuất
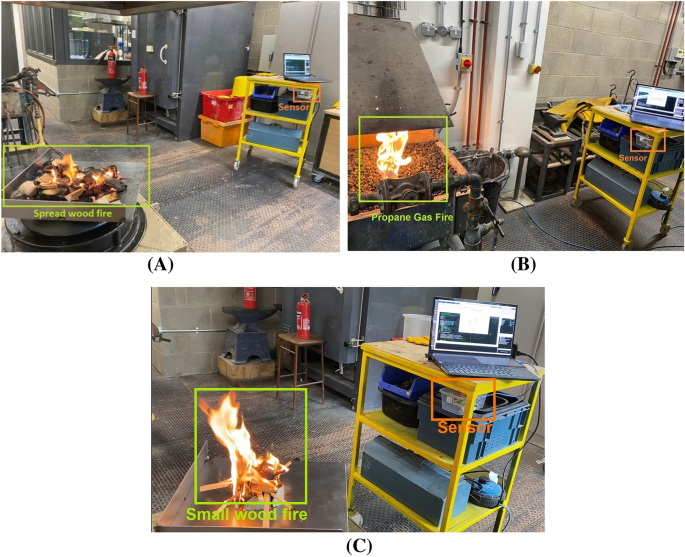
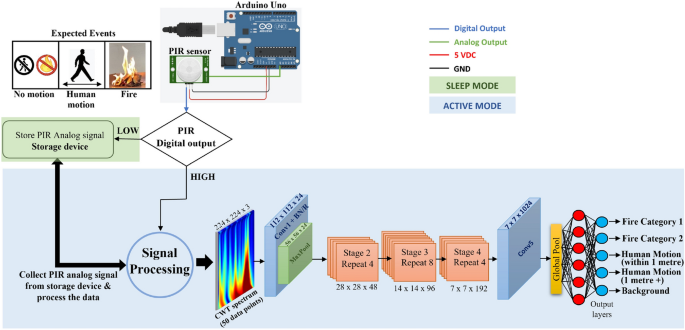
Trong công việc này, những thay đổi trong bức xạ IR cho các sự kiện lửa và không bắn được ghi lại bằng cảm biến chuyển động PIR HC-SR501 [25]. Thiết lập thử nghiệm để thu thập dữ liệu được hiển thị trong hình. 1. Tất cả các thí nghiệm được thực hiện theo các hướng dẫn và quy định về sức khỏe và an toàn cho các thí nghiệm lửa.
Trong kỹ thuật được đề xuất, cảm biến PIR vi sai được cấu hình với bộ điều khiển vi mô Arduino Uno (ATMEGA328P). Dữ liệu từ cảm biến Pir khác biệt là tín hiệu tương tự thay đổi thời gian liên tục. Biên độ của nó tỷ lệ thuận với kích thước cơ thể nóng, tốc độ của chuyển động và khoảng cách với cảm biến. Tín hiệu được xử lý bằng cách sử dụng biến đổi wavelet. Các hệ số wavelet được chuyển đổi thành phổ RGB (màu xanh lục màu xanh). Do quy trình phân đoạn màu này trong không gian RGB, rất có thể các vùng ngọn lửa có thể được xác định và cung cấp là hình ảnh đầu vào tương thích với các DNN được đào tạo trước để phân loại các sự kiện xảy ra trong phạm vi xem của cảm biến. Hình 2 thể hiện kỹ thuật phát hiện lửa được đề xuất.
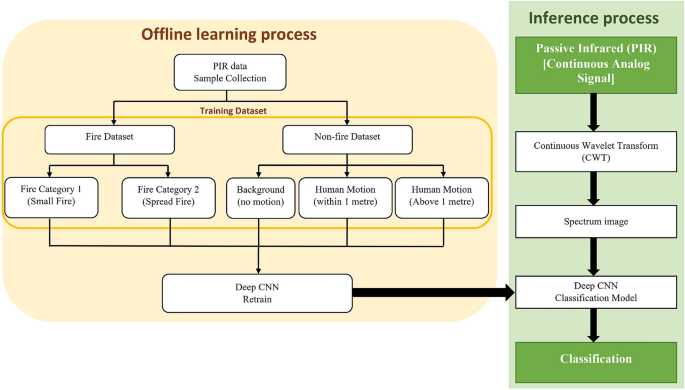
Phần còn lại của phần giải thích các lĩnh vực chính của công việc này theo phân loại sự kiện, thu thập dữ liệu, xử lý tín hiệu số, xử lý trước dữ liệu, kiến trúc DNN và chiến lược hiệu suất thời gian thực.
2.1 phân loại sự kiện
Vì kỹ thuật phát hiện lửa được đề xuất dành cho các cài đặt trong nhà và cảm biến PIR vi sai nhạy cảm với các chuyển động, các biến như khoảng cách với cảm biến, các mẫu chuyển động khác nhau của con người và tốc độ di chuyển cũng được xem xét trong công việc này. Do đó, dữ liệu cảm biến PIR được thu thập cho năm sự kiện chuyển động khác nhau sau đây để ghi lại những thay đổi của chúng trong bức xạ IR.
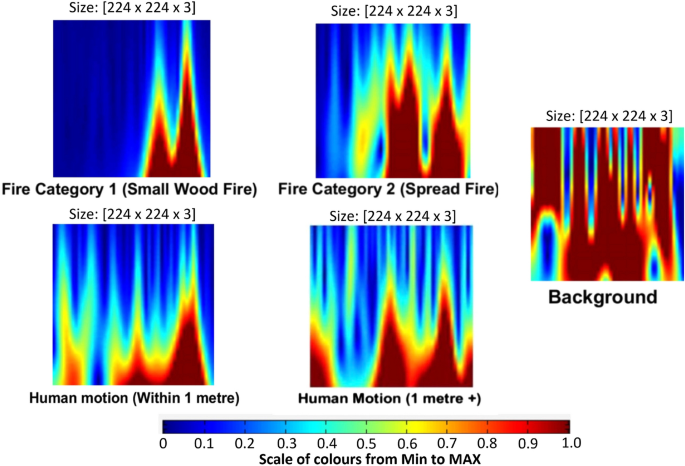
- 1. Nền (không chuyển động)
- 2. Chuyển động của con người (trong vòng 1 m từ cảm biến)
- 3. Chuyển động của con người (cách cảm biến hơn 1 m)
- 4. Lửa loại 1 (Lửa gỗ nhỏ)
- 5. Lửa loại 2 (cả gỗ lan truyền và khí propan)
Khi không có chuyển động trước cảm biến, nó được phân loại là sự kiện nền. Các chuyển động của con người trong vòng 1 m và xa hơn chứa tín hiệu cảm biến cho chuyển động của con người trong phạm vi 0.2 m đến 1 m và 1.Tương ứng 1 m đến 3 m. Vì cảm biến PIR nhạy cảm với chuyển động, nên sự dao động của điện áp đầu ra cao hoặc thấp đối với các chuyển động nhanh hoặc chậm tương ứng. Do đó, cả chuyển động đi bộ chậm của con người và chuyển động đi bộ nhanh của con người được ghi lại. Ngoài ra, các chuyển động của con người trên một chiếc ghế xoay cũng được ghi lại. Cuối cùng, hai sự kiện loại lửa được ghi lại (xem hình. 1). Lửa loại 1 có bản ghi lửa gỗ nhỏ giữa 0.5 m và 3 m từ cảm biến. Lửa loại 2 bao gồm lửa lớn hơn hoặc không thể kiểm soát được. Truyền lửa gỗ và các vụ cháy khí propan được ghi lại cho sự kiện này. Độ che phủ của gỗ trong trường hợp lửa gỗ nhỏ và lửa gỗ là 10 \ (>^\).
2.2 Thu thập dữ liệu
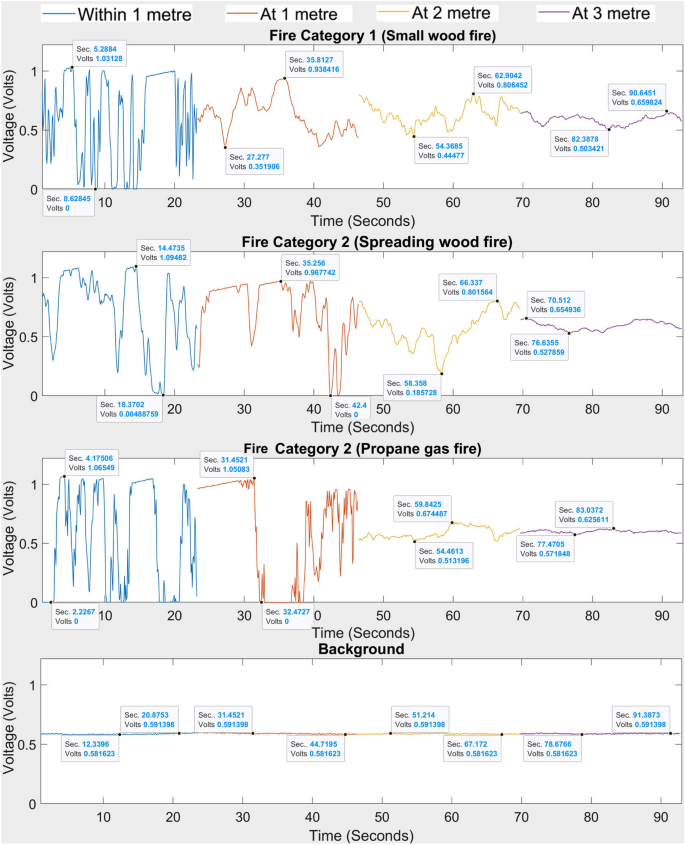
Hai yếu tố cảm biến điện pyro bên trong cảm biến PIR tạo ra những thay đổi khác biệt dương hoặc âm nếu cơ thể ấm vào hoặc rời khỏi khu vực phát hiện cảm biến được giới hạn bởi hai khe cắm trên cảm biến. Do đó, cảm biến tạo ra tín hiệu điện áp kỹ thuật số cao hoặc thấp tùy thuộc vào sự thay đổi mức độ bức xạ IR. Do biên độ của các tín hiệu này rất nhỏ, các tín hiệu tương tự được khuếch đại được trích xuất từ cảm biến PIR bằng cách nhấn trực tiếp từ bộ khuếch đại mạch cảm biến BISS0001. Do đó, các tín hiệu tương tự được khuếch đại được ghi lại trong năm sự kiện được giải thích trong giáo phái. 2.1. Các tín hiệu đầu ra được hiển thị trong Hình. 3 và 4.
Vì trọng tâm là lửa, nên nên xem xét tần số nhấp nháy ngọn lửa để lấy mẫu tín hiệu. Hành vi nhấp nháy ngọn lửa là dải tần số băng rộng bao gồm 1 Hz Hz 13 Hz [17]. Xem xét quy tắc lấy mẫu, tốc độ lấy mẫu được chọn là 50 Hz, cao hơn gấp đôi tần số nhấp nháy ngọn lửa. Tín hiệu tương tự từ cảm biến PIR được chuyển sang Arduino Uno, sau đó được chuyển sang máy tính để xử lý tín hiệu thêm. Arduino Uno được cấu hình bằng MATLAB [26] để thực hiện xử lý tín hiệu bằng mạng DL được đào tạo.
Hình 3 và 4 cho thấy các mẫu tín hiệu PIR khuếch đại có các đặc điểm khác nhau cho các sự kiện được xem xét trong miền thời gian. Trong sự kiện nền mà không có chuyển động xảy ra, biên độ tín hiệu thay đổi từ 0.58 V đến 0.59 v. Phạm vi này hoạt động như đường trung tâm xung quanh tín hiệu dao động khi phát hiện chuyển động. Khi cường độ của nhiệt hồng ngoại tăng, biên độ tăng (trên hoặc dưới đường trung tâm). Do PIR nhạy cảm với chuyển động nhiệt hồng ngoại, sự dao động biên độ giảm khi khoảng cách của sự kiện tăng lên và ngược lại. Có thể được thấy rõ ràng từ y phục. 3 rằng các loại lửa 1 (lửa gỗ nhỏ) và 2 (lan truyền lửa gỗ và lửa khí propan) có xu hướng gần như tương tự với khoảng cách khác nhau. Ví dụ, các tín hiệu lửa gỗ lan rộng và khí propan trong và ở mức 1 m có các biến thể biên độ giữa 0 V và 1.09 v. Tuy nhiên, khi khoảng cách tăng (ở mức 2 và 3 m), biên độ tín hiệu lửa của họ bị thu hẹp xuống còn khoảng từ 0.5 V và 0.8 v. Vì ngọn lửa lan rộng (loại 2) chiếm một không gian rộng hơn trong phạm vi xem của cảm biến, chuyển động của nó được phát hiện tốt hơn lửa nhỏ (loại 1). Ví dụ, ở khoảng cách 1 m, biên độ tín hiệu lửa nhỏ giảm xuống phạm vi giữa 0.35 V và 0.94 V, trong khi biên độ tín hiệu lửa lan truyền nằm trong khoảng từ 0 V đến 0.96 v.
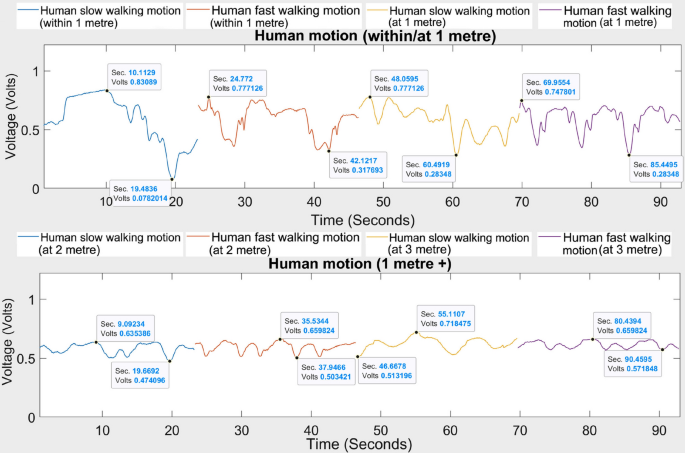
Ngược lại, tín hiệu chuyển động của con người trong vòng 1 m cho thấy phạm vi biên độ giữa 0.08 V và 0.83 V (xem hình. 4). Tương tự như tín hiệu lửa, phạm vi này thu hẹp hơn nữa với khoảng cách. Nó được quan sát thấy rằng không có sự khác biệt đáng chú ý về biên độ cho chuyển động đi bộ chậm và nhanh của con người vượt quá 1 m. Ngoài ra, có thể thấy rằng chuyển động của con người và ngọn lửa vượt quá 2 m có phạm vi biên độ tương tự. Điều này làm cho nó khó khăn để phân biệt các hoạt động hàng ngày của con người với hỏa hoạn bằng cách sử dụng phân loại sự kiện dựa trên biên độ.
2.3 Xử lý tín hiệu
Xử lý tín hiệu tập trung vào việc phân tích, sửa đổi và tổng hợp tín hiệu dựa trên các yêu cầu của người dùng [27]. Do tính chất năng động của mức bức xạ ngọn lửa, các tín hiệu lửa là không cố định. Các kỹ thuật xử lý tín hiệu được sử dụng rộng rãi như biến đổi Fourier giả định tín hiệu được xử lý là đứng yên. Do đó, trong công việc này, tín hiệu cảm biến PIR được phân tích bằng cách sử dụng các sóng con. Không giống như Biến đổi Fourier, phân tích wavelet giúp xây dựng mối quan hệ tần số thời gian bằng cả hai miền thời gian và tần số [28]. Wavelets cũng có các bộ lọc sẵn có loại bỏ tiếng ồn khỏi tín hiệu và có ít chi phí tính toán hơn so với biến đổi Fourier.
Các con sóng là các dạng sóng không đối xứng và không đều kéo dài trong một khoảng thời gian ngắn với giá trị trung bình là 0. Phân tích wavelet tạo ra các sóng con cấu thành của các thang đo và vị trí khác nhau của sóng con [20]. Do đó, trong biến đổi sóng con liên tục (CWT), tín hiệu đầu vào được nhân với các phiên bản bị trễ và kéo dài của sóng con đã chọn và sau đó được tích hợp trong khoảng thời gian của tín hiệu. Quá trình này tạo ra các hệ số wavelet c. Quá trình có thể được hiển thị như:
$$ \ bắt đầu
Trong đó \ (f (t) \) là tín hiệu gốc (tín hiệu pir trong trường hợp này) trong miền thời gian và \ (\ psi (t) \) là hàm sóng con mẹ. Có nhiều loại chức năng sóng con khác nhau như Haar, Daubechies, Coiflets, Symlets, Biorthogonal, ETC. Wavelet mẹ cần được chọn một cách thích hợp để phù hợp với các gai tạm thời của tín hiệu cảm biến PIR ban đầu. Sau đó, có thể đạt được sự hủy bỏ tiếng ồn tốt hơn mà không có biến dạng [28]. Các hệ số wavelet c cho biết mức độ gần nhau của wavelet đã chọn tương quan giữa các phần của tín hiệu gốc.
Trong bài báo này, wavelet Morse [29] trong hộp công cụ Wavelet Matlab [30] được sử dụng. Đầu ra tương tự được khuếch đại từ cảm biến PIR bị ảnh hưởng bởi nhiễu và tín hiệu trôi do sự thay đổi nhiệt độ khí quyển. Ngân hàng bộ lọc CWT được sử dụng để lọc nhiễu này và mang lại tín hiệu liên quan đến tần số. Nói chung, tần số dao động tín hiệu PIR cho ngọn lửa nhấp nháy cao hơn tín hiệu PIR của một đối tượng chuyển động [17]. Các tham số khác nhau của ngân hàng lọc được thay đổi để trực quan hóa các tính năng riêng biệt cho từng sự kiện.
2.4 Khung học tập sâu
Các khung DL cung cấp các khối xây dựng để thiết kế và đào tạo các mạng thần kinh sâu bằng thuật toán, mô hình được đào tạo trước và các ứng dụng cũng như trực quan hóa tiến trình đào tạo mô hình. Các khung DL được sử dụng rộng rãi là Tensorflow, Keras, Pytorch, Theano, Caffe, ETC. Trong bài báo này, hộp công cụ DL trong MATLAB được sử dụng [31].
2.5 Dữ liệu xử lý trước và xây dựng bộ dữ liệu
Vì cấu trúc dữ liệu đầu vào cho DNN phải ở định dạng hình ảnh (mảng 3-D), nên xử lý trước dữ liệu được thực hiện. Dữ liệu được thu thập từ cảm biến PIR ở định dạng chuỗi thời gian liên tục (tham khảo Hình. 3, 4) sau đó được phân đoạn theo chiều dài 50 điểm dữ liệu trong các bước 5 để đào tạo DNN. 50 điểm dữ liệu này được gán thành bộ dữ liệu được xử lý thông qua CWT.
Sau đó, kích thước của ma trận 2 chiều kết quả với các hệ số tuyệt đối là \ (61 \ lần 50 \) trong đó mỗi hàng và cột tương ứng với một thang đo và điểm dữ liệu tương ứng. Các hệ số tuyệt đối này được chia tỷ lệ lại và chuyển đổi thành một phổ có kích thước \ (61 \ lần 50 \ lần 3 \) (\ (\ text \ Times \ text \ Times \ text \)). Kiến trúc DNN đã chọn (tham khảo Bảng 4) yêu cầu một mảng có kích thước \ (224 \ lần 224 \ lần 3 \) làm dữ liệu đầu vào. Do đó, các biểu đồ từ CWT được chuyển đổi thành định dạng hình ảnh RGB và được thay đổi kích thước theo yêu cầu bằng cách sử dụng các kỹ thuật tăng dữ liệu.
Hình 5 cho thấy các ví dụ về định dạng hình ảnh RGB của các biểu đồ đối với năm sự kiện được tạo bởi CWT. Từ ma trận \ (224 \ lần 224 \ lần 3 \) (kích thước hình ảnh phổ), DNN trích xuất các tính năng riêng biệt cho mỗi lớp/sự kiện và học cách nhận ra sự kiện xảy ra trước cảm biến. Để tránh các vấn đề quá mức, nên cung cấp số lượng dữ liệu tương tự trong quá trình đào tạo. Do đó, mỗi lớp/sự kiện (tham khảo giáo phái. 2.1) Bao gồm 5915 quang phổ RGB để đào tạo, 2535 để xác nhận và 1690 để kiểm tra.
2.6 Kiến trúc DNN
CNN là thuật toán DL được thiết lập nhiều nhất để xử lý các mẫu dữ liệu, trích xuất và phân loại các tính năng [32]. Kiến trúc DNN có ba lớp chính: tích chập, gộp và kết nối đầy đủ. Lớp chập đóng vai trò quan trọng trong DNNS. Để thực hiện trích xuất tính năng, tích chập yêu cầu một hạt hoặc bộ lọc kích thước cụ thể để trượt qua hình ảnh đầu vào dựa trên sải. Sải bước là khoảng cách giữa hai hạt nhân liên tiếp, xác định các cột trong đó bộ lọc sẽ di chuyển trên hình ảnh đầu vào. Trong quá trình này, phép nhân ma trận phần tử thông minh đạt được ở mọi vị trí giữa hạt nhân và đầu vào để trích xuất bản đồ tính năng từ hình ảnh. Tương tự như vậy, nhiều hạt nhân hoạt động như các trình trích xuất tính năng khác nhau. Trong quá trình đào tạo, các hạt nhân tốt nhất trong các lớp và trọng số tích hợp trong các lớp được kết nối đầy đủ được xác định cho bộ dữ liệu đào tạo. Lớp tích chập chứng minh hiệu quả vì các lớp gần với đầu vào Tìm hiểu các tính năng cấp thấp như đường, đường cong, v.v. Và khi các lớp đi sâu hơn, mạng học được các tính năng cấp cao như hình dạng, các đối tượng cụ thể, v.v. Trong tác phẩm này, Mobilenet-V2, Shufflenet, VGG-16, Googlenet và DNN được thiết kế tùy chỉnh được chọn để đào tạo dữ liệu (xem Bảng 1).
2.7 Chiến lược làm việc theo thời gian thực
Sơ đồ của chiến lược làm việc thời gian thực được thể hiện trong hình. 6. Hai giai đoạn được giải thích dưới đây.
2.7.1 chế độ ngủ
Khi không phát hiện ra chuyển động, nó được gọi là trạng thái bình thường hoặc chế độ ngủ. Đầu ra kỹ thuật số của cảm biến PIR hoạt động như một kích hoạt. Ở trạng thái bình thường, đầu ra kỹ thuật số của PIR sẽ thấp, sẽ tắt đơn vị xử lý tín hiệu và DNN. Trong khi đó, đầu ra tương tự từ cảm biến PIR được lưu trữ trong thiết bị lưu trữ.
2.7.2 Chế độ hoạt động
Khi một chuyển động được phát hiện, đầu ra kỹ thuật số từ Pir sẽ cao. Điều này bắt đầu kích hoạt bật bộ xử lý tín hiệu và DNN để phân loại sự kiện xảy ra bên trong phạm vi xem của cảm biến. Hệ thống hoạt động cho đến khi DNN phân loại nền (không có chuyển động). Sau đó, nó quay trở lại chế độ ngủ (tắt đơn vị xử lý tín hiệu và mô hình DNN).
Do đó, thuật toán hoạt động khi phát hiện chuyển động. Điều này làm cho mô hình tiết kiệm năng lượng bằng cách chống lại đơn vị xử lý tín hiệu và mô hình CNN sâu ở trạng thái bình thường. Trong chế độ hoạt động, 50 điểm dữ liệu cuối cùng được xử lý bởi đơn vị xử lý tín hiệu và mạng DL để phân loại sự kiện. Kết quả là, toàn bộ chiến lược làm việc thời gian thực tương tự như một luồng video làm mới mỗi lần khi điểm dữ liệu mới được thu thập từ cảm biến PIR. Tỷ lệ làm mới được thảo luận trong giáo phái. 3.3.
3 Kết quả thí nghiệm
Phần này mô tả kết quả đào tạo và xác nhận CNN. Sau đó, quan sát hiệu suất thời gian thực được trình bày cho năm sự kiện được chọn trong tác phẩm này.
3.1 kết quả đào tạo
Tất cả các DNN được liệt kê trong Bảng 1 được đào tạo bằng cách sử dụng dữ liệu thử nghiệm cho năm sự kiện được thu thập trong môi trường được kiểm soát (xem hình. 1). Các kết quả đào tạo tương ứng được đưa ra trong Bảng 3. Khi googlenet với lớp bỏ mặc định được sử dụng, độ chính xác xác thực là 79.91%, trong khi Googlenet không có bất kỳ lớp bỏ học nào cho độ chính xác xác nhận là 78.1%. Tuy nhiên, việc thêm nhiều lớp bỏ học (tham khảo Bảng 2) dần dần làm giảm độ chính xác của mô hình Googlenet như trong Bảng 3. Lớp chuẩn hóa hàng loạt (BN) được thêm vào kiến trúc Googlenet để cải thiện tốc độ đào tạo và hiệu suất. Theo các hướng dẫn từ [34], lớp BN được thêm vào bên trong 4 mô -đun khởi động cuối cùng trong số 9 mô -đun xếp chồng lên nhau một cách tuyến tính trong kiến trúc Googlenet [35]. Tuy nhiên, khi lớp bỏ học của googlenet bị loại bỏ, độ chính xác là 76.25% kém chính xác hơn so với sử dụng googlenet mặc định.
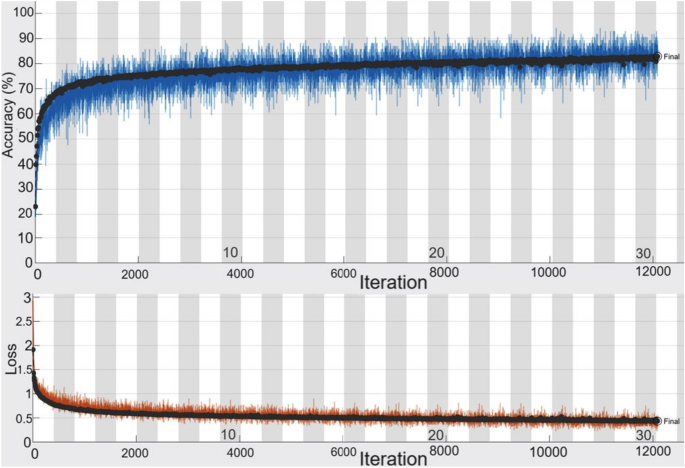
Bảng 3 cho thấy rằng Shufflenet với các trọng số được đào tạo trước cho 83.Độ chính xác xác thực 6%. Vì nó có số lượng lớp và tham số ít hơn (tham khảo Bảng 1), chi phí tính toán của nó cũng thấp. Do đó, Shufflenet-V2 được chọn làm mô hình DNN cho công việc này và kiến trúc được minh họa trong Bảng 4. Ở đây, các đầu vào kiến trúc DNN là các hệ số sóng con của tín hiệu cảm biến PIR được chuyển đổi thành phổ RGB. Khi kiến trúc Shufflenet-V2 được đào tạo bằng cách sử dụng dữ liệu cảm biến PIR 1 kênh, độ chính xác xác thực giảm xuống 80.86% so với 83.6% sử dụng phổ RGB. Tiến trình đào tạo của Shufflenet-V2 được thể hiện trong hình. 7.
3.2 Kết quả kiểm tra
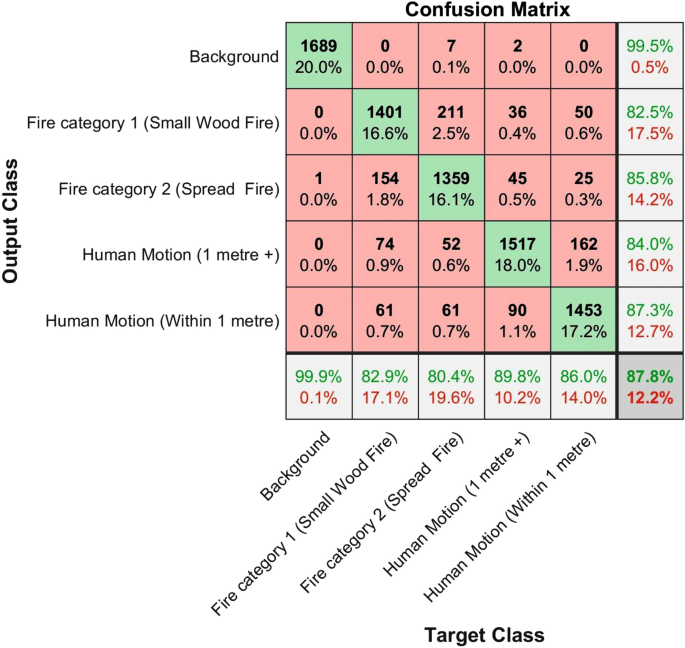
Hình 8 cho thấy các tích cực thực sự (dự đoán) cao hơn dự đoán sai. Mỗi sự kiện có 1690 hình ảnh, trong đó nền có điểm tích cực thực sự cao nhất là 99.9%. Dự đoán chuyển động của con người đạt được độ chính xác 86% trong vòng 1 m và 89.8% cho hơn 1 m. Lửa loại 1 và Fire loại 2 đạt điểm chính xác là 82.9% và 80.4% tương ứng. Vì cả hai loại lửa đều có các tính năng tương tự như chiều dài ngọn lửa, góc nghiêng ngọn lửa, v.v. Tại một số trường hợp, có những tích cực sai cho hai loại lửa. Tỷ lệ dương tính giả cho lửa loại 1 là 2.5%, trong khi đó cho lửa loại 2 là 1.số 8%. Những dự đoán tương tự cũng xảy ra trong các sự kiện chuyển động của con người. Tuy nhiên, dự đoán sai chỉ xảy ra trong các sự kiện thể loại chính: chuyển động của lửa và con người. Nhìn chung, tỷ lệ chính xác của dự đoán thực sự và dự đoán sai là 87.8% và 12.2% tương ứng. Khi một hệ thống truy cập được giới thiệu, phát hiện lửa cuối cùng là 95.34% và phát hiện chuyển động của con người là 92.39% như được đưa ra trong Bảng 6. Trong hệ thống này, một báo thức chỉ được kích hoạt khi một đám cháy được dự đoán hơn ba lần, không có bất kỳ dao động nào cho chuyển động hoặc nền của con người.
3.3 Quan sát hiệu suất thời gian thực
Đánh giá hiệu suất thời gian thực được thực hiện trên Intel Core i9-9980HK 2.CPU 4GHz với RAM 32 GB và Nvidia Geforce RTX 2060. Hiệu suất thời gian thực được thực hiện với tốc độ 12 khung hình mỗi giây. Các quan sát cho các sự kiện lửa thời gian thực được chọn được thảo luận dưới đây. Một số mẫu dự đoán mô hình được ghi lại trong thời gian thực được hiển thị trong hình. 9. Chìa khóa để giới thiệu xác suất dự đoán được đưa ra trong hình. 9 (m).
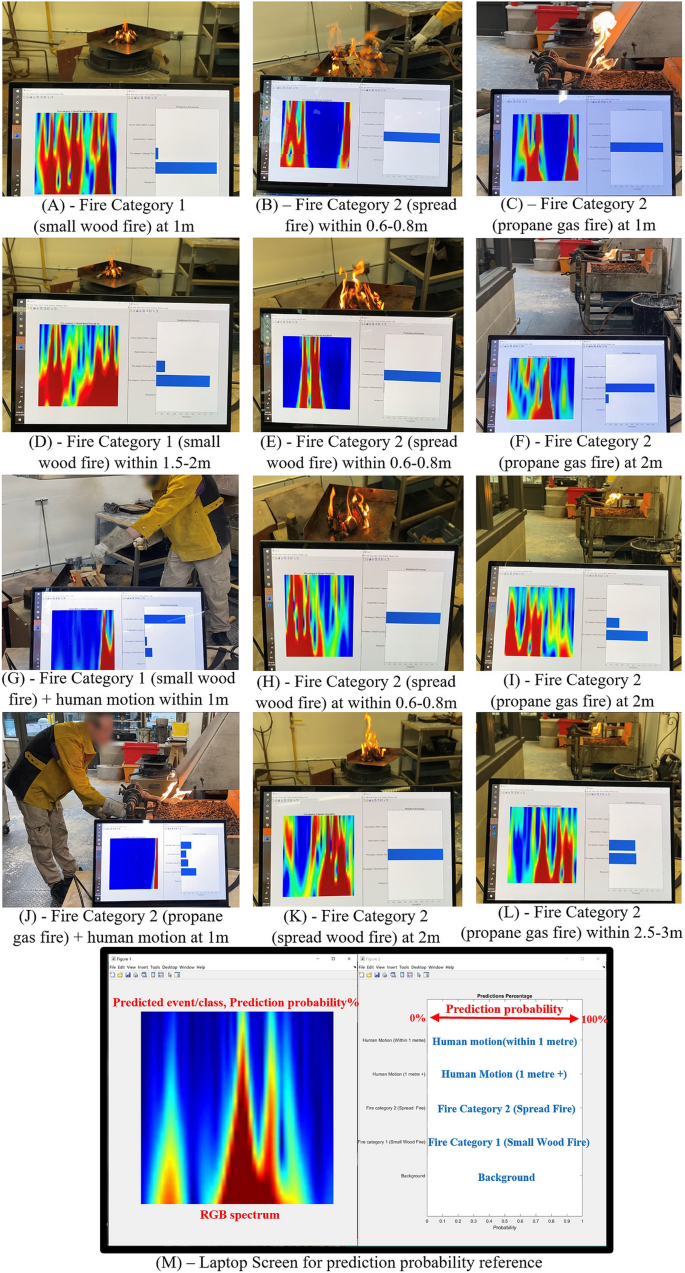
3.3.1. Bối cảnh
Như thể hiện trong hình. 8, Hiệu suất thời gian thực để dự đoán nền là dự đoán tích cực gần như 100%.
3.3.2 chuyển động của con người (trong và ngoài 1 m)
Chuyển động đi bộ chậm và nhanh của con người, và người xoay người trên ghế xoay được quan sát thấy trong thể loại này.
- Trong vòng 1 m: Tích cực thực sự cao hơn dương tính giả. Trong trường hợp các sự kiện hỗn hợp (xem hình. 9g) Với lửa gỗ nhỏ và chuyển động của con người (trong vòng 1 m), mô hình dự đoán 81.8% là chuyển động của con người (trong vòng 1 m) và loại lửa 1 là 16%.
- Từ 1 m… 3 m: Trong dịp này, xác suất tích cực thực sự là gần 87%. Dự đoán sai xảy ra ở giữa các dự đoán thực sự trong 12 dự đoán mỗi giây. Hầu hết các dự đoán sai là chuyển động của con người (trong vòng 1 m).
3.3.3 Lửa loại 1 (Lửa gỗ nhỏ)
- Trong/ở mức 1 m: Thuật toán mang lại dự đoán thực sự cao gần 95% (xem hình. 9a). Tuy nhiên, một tỷ lệ nhỏ (1.8%) bị phân loại sai để bắn loại 2 nếu lửa gỗ nhỏ di chuyển nhanh hơn do gió.
- Từ 1 m… 2 m: Nó dự đoán tích cực thực sự cao (86%) với ít dương tính giả hơn (14%) như trong hình. 9d. Trong sự kiện, 0.9% dự đoán dao động với chuyển động của con người (1 m+) ở giữa các dự đoán tích cực thực sự.
- Từ 2 m… 3 m: Trong vòng 2 m, 3 m 3 m từ lửa, dương tính giả cao được ghi nhận chủ yếu là do chuyển động của con người (1 m+).
3.3.4 Lửa loại 2 (Lửa lan rộng)
- Trong/ở mức 1 m: Trong cả hai vụ cháy gỗ và khí propane, dự đoán thực sự 100% đạt được mà không có bất kỳ dao động dự đoán sai nào trong thời gian thực (xem hình. 9b, C, E, H). Mô hình này cũng hoạt động tốt trong các sự kiện hỗn hợp của lửa khí propane (loại 2) và chuyển động của con người (ở mức 1 m) như trong hình. 9J. Vì lửa khí propane nhỏ hơn trong trường hợp đó, mô hình dự đoán lửa loại 1, chuyển động của con người (trong vòng 1 m) và loại lửa 2 lần lượt là 37%, 25%và 18%.
- Từ 1 m… 2 m: Trong dịp này (lan truyền lửa gỗ và lửa propan), gần 90% tích cực thực sự được quan sát với những dự đoán ít sai về lửa gỗ nhỏ (xem hình. 9f, i, k).
- Từ 2 m… 3 m: Trong ngọn lửa gỗ lan rộng, dự đoán tích cực thực sự cao được ghi nhận. Tuy nhiên, các dao động cao của các dự đoán sai được quan sát thấy trong vụ cháy propane. Do quan điểm xa (xem hình. 9L), lửa khí propane được dự đoán là gần 50% cho cả hai loại lửa 1 và 2. Có 50% cơ hội để dự đoán một ngọn lửa lan truyền khí propane như một đám cháy nhỏ ở khoảng cách 2 m.
4. Thảo luận
Trong bài báo này, các thí nghiệm được thực hiện bằng cảm biến PIR để thu thập dữ liệu của con người, lửa và nền để đào tạo DNN và sau đó phát hiện lửa được kiểm tra trong thời gian thực. Kể từ đó, Shufflenet-V2 mang lại độ chính xác xác nhận cao nhất là 87.8% với tốc độ 12 khung mỗi giây, nó được sử dụng cùng với cảm biến PIR để thực hiện các thí nghiệm phát hiện lửa thời gian thực. Phát hiện lửa dựa trên cảm biến PIR gần như tương đương về hiệu suất với hệ thống phát hiện lửa dựa trên video. Tuy nhiên, các hệ thống dựa trên video tương đối đắt hơn. Không giống như trong các hệ thống phát hiện lửa dựa trên tầm nhìn, các cảm biến PIR có thể phát hiện lửa bằng cách sử dụng tín hiệu một chiều với chi phí tính toán ít hơn. Ngoài ra, chiến lược làm việc thời gian thực được sửa đổi để giảm báo động sai và do đó sử dụng công suất tính toán một cách hiệu quả. Như đã thảo luận trong giáo phái. 3.3, Dự đoán thời gian thực có thể dao động trong 12 dự đoán mỗi khoảng thời gian thứ hai. Do đó, một bộ đếm được xây dựng để bắt đầu báo động nếu một đám cháy được dự đoán trong hơn 3 dự đoán, tôi.e., cho 0.25 s, không có bất kỳ dao động nào cho chuyển động hoặc nền của con người. Hệ thống bộ đếm này làm giảm hiệu quả tốc độ báo động sai như trong Bảng 5.
Bảng 5 Tỷ lệ phát hiện sự kiện của mô hình được đề xuất với hệ thống truy cập được bật
Bảng 6 so sánh kết quả từ phương pháp được đề xuất (sau khi kích hoạt hệ thống bộ đếm) và các mô hình tương tự khác
Trong văn học, các cảm biến PIR được sử dụng chủ yếu để phát hiện các chuyển động của lửa/ngọn lửa hoặc con người [17, 37, 38]. Trong phương pháp đề xuất của chúng tôi, một cảm biến PIR được sử dụng để dự đoán cả chuyển động lửa và con người trong thời gian thực khi xảy ra trong phạm vi xem của cảm biến. Bảng 6 minh họa một số dự đoán phát hiện chuyển động của lửa và con người được tìm thấy trong tài liệu so với dự đoán mô hình được đề xuất. Mô hình được đề xuất cho thấy kết quả đầy hứa hẹn trong việc phát hiện cả chuyển động lửa và con người. Các mô hình được tham chiếu có ý định phát hiện các mô hình chuyển động của lửa hoặc con người; không phải cả hai. Theo [17, 37], các sự kiện chỉ được phân loại là các sự kiện lửa và không cháy, trong đó các tác giả coi vụ cháy giấy và rượu là loại lửa. Làm việc trong [38] chỉ tập trung vào phát hiện sự kiện chuyển động của con người. Trong phương pháp đề xuất của chúng tôi, ý định là phát hiện sự lan truyền của lửa bằng cách sử dụng hai nguồn lửa khác nhau và mô hình chuyển động của con người. Ngoài ra, mô hình đề xuất có khả năng phân biệt ngọn lửa là nhỏ hoặc lan truyền trong vòng 2 m (xem hình. 9).
Bảng 5 minh họa nền (không có chuyển động), tốc độ phát hiện của lửa và con người là 99.71%, 95.34% và 92.39% tương ứng. Như thể hiện trong hình. 9, Phương pháp đề xuất của chúng tôi kiểm tra cả hai loại chuyển động của lửa và con người: Lửa nhỏ và lan truyền, và chuyển động của con người trong vòng 1 m và vượt quá 1 m từ cảm biến PIR. Hình 3 và 4 cho thấy lửa gỗ nhỏ ở 3 m tương tự như chuyển động của con người ở khoảng cách hơn 1 m; cụ thể là 3 m. Điều này cho thấy các mẫu chuyển động khác nhau của con người dẫn đến các mẫu dữ liệu PIR khác nhau tương tự như các mẫu lửa ở một số trường hợp. Như đã lưu ý trong Bảng 5, vấn đề này được giải quyết trong mô hình của chúng tôi bằng cách sử dụng hệ thống quầy để ngừng xác nhận bất kỳ dự đoán hoặc phát hiện lửa sai nào.
DNN được đào tạo với dữ liệu hạn chế cho chuyển động của con người vì chuyển động của con người có các mô hình chuyển động khác nhau. Cảm biến PIR tạo ra dữ liệu đầu ra khác nhau cho các chuyển động/hành động khác nhau của con người. Ví dụ, chuyển động đi bộ của con người khác với chuyển động chạy của con người; bàn tay con người vẫy trên đầu khác với các chuyển động nhảy của con người. Do đó, người ta nhấn mạnh rằng DNN được đào tạo với dữ liệu hạn chế từ việc đi bộ chậm của con người, đi bộ nhanh và xoay trên ghế xoay. Do đó, trong dự đoán thời gian thực, nếu một con người thực hiện một số chuyển động không đều (không bao gồm các sự kiện chuyển động của con người) như nhảy trước cảm biến, có khả năng dự đoán nó là lửa cao hơn. Nhưng, một dự đoán tích cực thực sự cao có được khi kiểm tra với ba mẫu chuyển động đơn giản của con người được đề cập ở trên.
Độ chính xác và mạnh mẽ của thuật toán có thể được cải thiện bằng cách đào tạo nó với các mô hình chuyển động và loại lửa khác nhau. Ngoài ra, công việc này có thể được mở rộng để sử dụng các mạng DL thay thế như các biến thể của bộ nhớ ngắn hạn (LSTM) như được trình bày trong [5, 39] để cải thiện độ tin cậy của phát hiện lửa.
Trong nghiên cứu này, cảm biến PIR không gặp phải sự cố. Các tài liệu về nhận dạng trực quan của các đối tượng với các khu vực sử dụng đào tạo sâu rộng các DNN với hình ảnh được dán nhãn của các đối tượng với các loại bỏ [40]. Một cách tiếp cận tương tự có thể được sử dụng để phân loại lửa với các loại. Độ chính xác có thể được tăng thêm bằng cách sử dụng các cảm biến bổ sung như cảm biến khói.
Trong các tòa nhà công nghệ cao tiên tiến, các cảm biến chuyển động được sử dụng làm công tắc bật/tắt tự động để giảm mức tiêu thụ điện năng. Kết quả phát hiện chuyển động lửa và con người của chúng tôi chỉ ra rằng kỹ thuật được đề xuất có thể được mở rộng để kết hợp các hệ thống chuyển đổi bật/tắt đèn này để phục vụ nhiều mục đích như phát hiện hành động và lửa của con người. Phát hiện con người cũng có thể hoạt động như một báo động trộm có thể bật khi người dùng ở bên ngoài văn phòng hoặc tòa nhà dân cư.
5. Kết luận
Trong bài báo này, thuật toán phát hiện lửa dựa trên cảm biến PIR khác biệt và DNNS được đề xuất. Các thí nghiệm được thực hiện bằng cách sử dụng cảm biến PIR để thu thập chuyển động của con người, lửa gỗ nhỏ và lan truyền, và dữ liệu nền sau đó được sử dụng để đào tạo DNNS. Kết quả đào tạo so sánh với các kiến trúc DNN khác nhau được trình bày. Kể từ đó, Shufflenet-V2 mang lại độ chính xác xác nhận cao nhất là 87.8% với tốc độ 12 khung mỗi giây, nó được sử dụng để thực hiện phát hiện lửa thời gian thực với cảm biến PIR. Hệ thống dự đoán hai loại lửa và ba mô hình chuyển động của con người thành công trong các thí nghiệm thời gian thực. Tốc độ phát hiện cho nền (không chuyển động), các loại lửa và chuyển động của con người là 99.71%, 95.34%và 92.39% tương ứng. Hơn nữa, cho phép kỹ thuật quầy trong hệ thống làm giảm tốc độ báo động sai 65.66%. Dự đoán sai tổng thể là 12.2% trước kỹ thuật quầy, và nó giảm xuống còn 4.19% sau kỹ thuật quầy. Nghiên cứu này chỉ ra rằng hệ thống được đề xuất có thể được sử dụng để phân biệt các loại lửa và mô hình chuyển động của con người nếu được đào tạo đầy đủ.
6 Thông tin bổ sung
Một video cho thấy các thí nghiệm được thực hiện để thu thập dữ liệu lửa và dự đoán lửa thời gian thực, được gửi cùng với bản thảo.
Pir là gì?
Pir là viết tắt của màu đỏ thụ động. Một cảm biến hồng ngoại thụ động là một cảm biến điện tử đo được ánh sáng hồng ngoại (IR) tỏa ra từ các vật thể trong lĩnh vực tầm nhìn của nó. Các cảm biến PIR thường được sử dụng nhiều nhất trong các máy dò chuyển động dựa trên PIR.
Máy dò chuyển động dựa trên PIR được sử dụng để cảm nhận sự di chuyển của con người, động vật hoặc các vật thể khác. Chúng thường được sử dụng trong chuông bao động trộm và trong các hệ thống chiếu sáng được kích hoạt tự động. Chúng thường được gọi là đơn giản “Pir”, Hoặc đôi khi “Pid”, vì “Máy dò hồng ngoại thụ động”.

Cảm biến Pir hoạt động như thế nào?
Một cảm biến màu đỏ thụ động phát hiện ra ánh sáng hồng ngoại tỏa ra bởi một vật ấm.
Tất cả các vật thể có nhiệt độ trên không phát ra năng lượng nhiệt tuyệt đối ở dạng bức xạ. Thông thường bức xạ này không’T có thể nhìn thấy mắt người vì nó tỏa ra ở bước sóng hồng ngoại, nhưng nó có thể được phát hiện bởi các thiết bị điện tử được thiết kế cho mục đích như vậy.
Cảm biến chuyển động Pir

Một cảm biến Pir phát hiện các nguồn nhiệt chuyển động. Ống kính (Fresnel) bao gồm một số phần; Khi hình ảnh nhiệt (bức xạ hồng ngoại) thay đổi, máy dò phản ứng. Con người và động vật lớn được chú ý; Những con vật nhỏ như côn trùng và nhện không.
Thuật ngữ thụ động trong trường hợp này đề cập đến thực tế là các thiết bị màu đỏ thụ động không tạo ra hoặc phát ra năng lượng cho mục đích phát hiện. Chúng hoạt động hoàn toàn bằng cách phát hiện bức xạ hồng ngoại phát ra hoặc phản xạ từ các vật thể. Họ không phát hiện hoặc đo lường “nhiệt”.
Làm thế nào để giảm báo động sai
Như đã nêu trước đây, bất kỳ “di chuyển nguồn nhiệt” Có thể đặt ra một báo thức. Điều này có nghĩa là các bản nháp, khu vực gió và ánh sáng mặt trời trực tiếp là tất cả các nguồn nhiệt để tránh. Các báo cáo không chính xác cũng được tạo ra bởi ánh sáng chói như một sự phản ánh về da đen. Nếu báo động sai xảy ra, hệ thống báo động’vị trí S hoặc độ nhạy cảm biến phải được điều chỉnh.
Nhiều sản phẩm mobeye bao gồm cảm biến màu đỏ thụ động hoặc có thể được sử dụng kết hợp với cảm biến màu đỏ thụ động làm phụ kiện. Bởi vì nó có một máy dò kép để xác minh, Mobeye báo động ngoài trời Máy dò, ví dụ, lọc ra phần lớn các nguồn này. Điều này hoạt động đặc biệt tốt trong điều kiện gió. CMVXI-R được xây dựng trên Optex’S dẫn đầu thị trường Pir, là công ty hàng đầu thế giới về công nghệ PIR.
Đơn vị có hai mẫu phát hiện, cả hai đều phải bị hỏng đồng thời để kích hoạt báo thức. Điều này dẫn đến việc phát hiện rất miễn nhiễm với báo động sai được tạo ra bởi chim, mèo, chó, v.v. Vì những con vật này sẽ không kích hoạt cả máy dò trên cùng và dưới cùng một lúc.
Phát hiện lớp kép kỹ thuật số
Hai cảm biến PIR nội bộ phân tích độc lập phát hiện để có thể lọc ra sự trùng hợp sai lệch. Công nghệ này hầu như loại bỏ việc phát hiện các động vật nhỏ hơn trong khuôn viên. Mô hình VXI-R được trang bị logic nhận dạng tín hiệu được tăng cường kỹ thuật số được gọi là SMDA. SMDA cải thiện khả năng miễn dịch chống lại các yếu tố tiếng ồn khác nhau như thay đổi khí hậu và thực vật.
Tất cả những gì bạn cần biết về cảm biến chuyển động
Một cảm biến chuyển động (hoặc máy dò chuyển động) là người chơi chính của hệ thống bảo mật của bạn vì nó’S là thiết bị chính phát hiện khi ai đó ở trong nhà bạn khi họ không nên’T là. Một cảm biến chuyển động sử dụng một hoặc nhiều công nghệ để nhận thấy chuyển động trong một khu vực. Nếu một cảm biến bị vấp, một dấu hiệu cảnh báo sẽ được gửi đến hệ thống bảo mật của bạn’Bảng điều khiển S, kết nối với thiết bị giám sát của bạn cảnh báo bạn và thiết bị giám sát với một mối đe dọa có thể xảy ra trong nơi cư trú của bạn.
Vai trò của cảm biến chuyển động trong an ninh nhà của bạn
Điểm chính của phát hiện chuyển động là cảm nhận được một tên trộm và gửi dấu hiệu cảnh báo đến bảng điều khiển của bạn, cảnh báo thiết bị giám sát của bạn. Cảm biến hoạt động khi bạn không ở nhà, hoặc khi bạn nói với hệ thống bạn không ở nhà. Một số hệ thống bảo mật có thể được đặt để ghi lại các sự kiện thông qua camera bảo mật khi phát hiện hoạt động.
Cảm biến chuyển động đứng bảo vệ, chuẩn bị phản ứng với nhiều tình huống khác nhau, chẳng hạn như chuyển động trong phòng khách của bạn, cửa sổ hoặc cửa.
Cảm biến chuyển động có thể:

- Thông báo cho bạn trong sự xuất hiện rằng con trai/con gái của bạn phá vỡ lệnh giới nghiêm
- Đặt chuông cửa khi ai đó đến gần cửa trước
- Thông báo cho bạn khi trẻ em vào các khu vực được phân loại trong nhà, như hầm, phòng tập luyện hoặc tủ thuốc
- Tiết kiệm năng lượng bằng cách sử dụng ánh sáng cảm biến chuyển động trong các khoảng trống
- Thông báo cho bạn nếu thú cưng đi vào các khu vực nơi chúng’RE không phải
Các loại cảm biến chuyển động
Hồng ngoại thụ động (Pir)
Phát hiện nhiệt cơ thể (năng lượng hồng ngoại). Cảm biến hồng ngoại thụ động là chuyển động được sử dụng rộng rãi nhất trong các hệ thống an ninh gia đình. Khi hệ thống của bạn được chuẩn bị, các cảm biến chuyển động của bạn được kích hoạt. Một khi cảm biến ấm lên, nó có thể cảm nhận được nhiệt và chuyển động ở các khu vực ngay lập tức, tạo ra một phòng thủ “Lưới.” Nếu một đối tượng chuyển động chặn rất nhiều vùng lưới và mức năng lượng hồng ngoại thay đổi nhanh chóng, các cảm biến sẽ được kích hoạt.
Lò vi sóng (MW)
Gửi các xung vi sóng và đo tín hiệu ra một đối tượng di chuyển. Chúng bao gồm một khu vực lớn được so sánh các cảm biến hồng ngoại, nhưng chúng dễ bị xâm nhập điện và tốn kém hơn.

Cảm biến chuyển động công nghệ kép
Cảm biến chuyển động có thể có các tính năng được chia sẻ trong nỗ lực giảm báo động sai. Ví dụ: cảm biến hồng ngoại (PIR) thụ động có thể được chia sẻ với cảm biến lò vi sóng. Vì mỗi hoạt động trong nhiều khu vực của thang đo và một là không hoạt động và một là hoạt động, các cảm biến chuyển động công nghệ kép không có khả năng như các loại khác để lý do báo động sai, để các báo thức phản ứng. Các cảm biến phải được kích hoạt. Mặt khác, điều này không có nghĩa là họ, không có lý do gây ra báo động sai.
Loại phản chiếu
Phát ra tia hồng ngoại từ đèn LED. Sử dụng tín hiệu của những tia đó, cảm biến đo khoảng cách đến cá nhân hoặc đối tượng và phát hiện nếu đối tượng nằm trong khu vực đã chọn.
Siêu âm
Các biện pháp phản ánh của một vật thể chuyển động và gửi các xung của sóng siêu âm.
Rung động
Những thứ này có thể được mua hoặc không gặp rắc rối ở nhà. Phát hiện lắc. Cảm biến rung tự chế sử dụng khối lượng nhỏ trên đòn bẩy, được kích hoạt bởi một núm để báo động khi nó rung. Các cảm biến chuyển động tự chế có thể hoạt động, nhưng chúng cũng có thể không thể đoán trước được.
Các đặc điểm cảm biến chuyển động khác
Cảm biến chuyển động không dây
Ngày nay, hầu hết các cảm biến chuyển động là không dây. Cảm biến không dây rất đơn giản để thiết lập. Họ không cần khoan, và họ giao tiếp với cơ chế hệ thống an ninh khác một cách không dây.
Cảm biến chuyển động liên hệ (cửa/cửa sổ)
Rất nhiều cảm biến chuyển động tiếp xúc là cảm biến hồng ngoại phản ứng. Họ đặt ra một báo thức nếu cửa hoặc cửa sổ được bảo vệ được mở trong khi hệ thống được trang bị.
Cảm biến chuyển động miễn dịch thú cưng
Một cảm biến hồng ngoại thụ động có thể được thiết lập để không chú ý đến động vật lên đến trọng lượng xác định. Một cảm biến chuyển động công nghệ kép là thách thức hơn đối với báo động sai do động vật gây ra vì nó cần hai cảm biến được kích hoạt theo cách được xác định bởi công ty.
Chúng có thể được thiết lập để coi thường một con vật lớn hoặc vô số động vật nhỏ mà không đặt ra một báo động sai. Một số cảm biến chuyển động chống thú cưng có mức độ nhạy cảm có thể được hòa hợp cho các gia đình có động vật rất năng động.
Cảm biến chuyển động video
Liên kết máy quay video với xử lý tín hiệu nâng cao. Một số cảm biến chuyển động có thể ghi lại được ghi khi chúng cảm nhận được chuyển động. Máy ảnh được điều khiển bởi các cảm biến chuyển động có thể lưu bạn lưu trữ bộ nhớ bằng cách không ghi lại hàng ngàn giờ của cảnh quay vô dụng, họ chỉ nắm bắt được thông tin quan trọng.
Thực tiễn tốt nhất cho các cảm biến lắp
Nếu bạn muốn một hệ thống cần cài đặt chuyên dụng, trình cài đặt sẽ biết thiết lập các cảm biến của bạn. Mặt khác, bạn có trách nhiệm thiết lập các cảm biến của mình nếu bạn đi với hệ thống bảo mật nhà DIY. Trước khi cài đặt các cảm biến chuyển động, hãy đảm bảo đọc các hướng dẫn thiết lập, vì chúng có thể sẽ bao gồm các đề xuất vị trí. Một số hệ thống DIY cũng cung cấp cho bạn lời nhắc điện tử hoặc bạn gọi cho một đại diện bán hàng sẽ hướng dẫn bạn qua quy trình thiết lập.

Hãy nhớ rằng các cảm biến chuyển động không phải là chống lỗi và có những trường hợp có thể có báo động sai. Báo động sai thường xuyên hơn không phải do lỗi điện, lỗi người dùng, kỹ thuật ứng dụng kém, tăng điện, sét và thiết bị bị lỗi. Chúng cũng có thể được kích hoạt bởi động vật, côn trùng và thực vật.
Thể loại
- Kiểm tra dòng chảy
- Hệ thống camera an ninh thương mại
- Hệ thống báo cháy
- Bình chữa cháy
- Vòi chữa cháy
- Hệ thống phòng cháy chữa cháy
- Hệ thống phun nước chữa cháy
- Hệ thống triệt tiêu lửa
- Hệ thống camera an ninh gia đình
Phát hiện lửa với xử lý hình ảnh và cảm biến PIR
![]()
Tải xuống pdf pdf miễn phí
Thư nhận dạng mẫu
![]()
Tải xuống pdf pdf miễn phí
Trong bài báo này, Khung hợp nhất quyết định thích ứng trực tuyến (EADF) dựa trên chức năng entropy được phát triển để phân tích hình ảnh và các ứng dụng tầm nhìn máy tính. Trong khuôn khổ này, người ta cho rằng thuật toán hợp chất bao gồm một số trang tính phụ mỗi trong đó đưa ra quyết định của riêng mình như một số thực tập trung vào 0. Các giá trị quyết định được kết hợp tuyến tính với các trọng số được cập nhật trực tuyến theo phương pháp hợp nhất hoạt động dựa trên việc thực hiện các phép chiếu entropic lên các bộ lồi mô tả các tính toán phụ. Người ta cho rằng có một nhà tiên tri, người thường là người điều hành con người, cung cấp phản hồi cho phương pháp hợp nhất quyết định. Một hệ thống phát hiện cháy rừng dựa trên video được phát triển để đánh giá hiệu suất của thuật toán trong việc xử lý các vấn đề mà dữ liệu đến tuần tự. Trong trường hợp này, Oracle là nhân viên bảo vệ của Tháp Lookout Forest xác minh quyết định của thuật toán kết hợp. Kết quả mô phỏng được trình bày. Khung EADF cũng được kiểm tra với bộ dữ liệu tiêu chuẩn.
![]()
Tải xuống pdf pdf miễn phí
Tóm tắt Trong bài báo này, khung quyết định thích ứng trực tuyến (EADF) dựa trên chức năng entropy được phát triển để phân tích hình ảnh và các ứng dụng tầm nhìn máy tính. Trong khuôn khổ này, người ta cho rằng thuật toán hợp chất bao gồm một số subalgorithms, mỗi trong đó đưa ra quyết định của chính nó như một số thực tập trung vào 0.
![]()
Tải xuống pdf pdf miễn phí
![]()
Tải xuống pdf pdf miễn phí
![]()
Tải xuống pdf pdf miễn phí
Một cảnh báo sớm là một điều cực kỳ quan trọng để giảm mất sự sống và tài sản từ lửa. Vùng quan tâm được chụp bằng camera CCD và được xác định bởi cảm biến khói trong nút cảm biến không dây. Thông tin màu của vùng thú vị có thể thu được với một ứng dụng của thuật toán mô hình màu xử lý hình ảnh kỹ thuật số. Nguồn lửa được xác định theo các đặc điểm thu được và mức khói. Hệ thống dựa trên việc lấy mẫu hình ảnh liên tục. Kết quả thử nghiệm cho thấy rằng hệ thống có thể xác định và xác nhận chính xác vụ cháy. Nút cảm biến video được thiết kế với các cảm biến như cảm biến MQ2 để cảm biến khói, cảm biến SHT75 cho cảm biến nhiệt độ và độ ẩm, cảm biến OPT101 để cảm biến ánh sáng và camera CCD. Báo thức chỉ được kích hoạt cho các sự cố hình ảnh lửa và lửa. Bằng cách kết hợp đầu ra cảm biến với đầu ra hình ảnh, tốc độ báo động sai bằng 0 và cải thiện tính ổn định. Phát hiện và phân tích ánh sáng là cơ sở cho hệ thống phát hiện lửa trong công việc xử lý hình ảnh này. Trong đám cháy này, các mô hình màu công việc như RGB, YMK và HSI được sử dụng để tách ánh sáng màu cam, vàng và độ sáng cao từ nền trong các điều kiện nhất định để phát hiện lửa. Sự khác biệt về khung được sử dụng để phân tích và tính toán sự tăng trưởng và lan rộng của lửa. Độ chính xác của hệ thống được kiểm tra và so sánh với nhau. Lượng xử lý dữ liệu có thể giảm do sử dụng thuật toán được đề xuất và do đó rút ngắn thời gian thực hiện và lưu trữ.
![]()
Tải xuống pdf pdf miễn phí
Máy ảnh Pir là gì và chúng hoạt động như thế nào?

Bạn có thắc mắc về cài đặt camera pir cho doanh nghiệp của bạn không? Clearway là một nhà lãnh đạo trong cài đặt CCTV, phục vụ các doanh nghiệp trên khắp Vương quốc Anh. Hãy liên lạc với Clearway và chúng tôi có thể nói chuyện với bạn thông qua các tùy chọn của bạn.
Nói chuyện với chúng tôi về máy ảnh pir!
Phát hiện Pir (Infra-Red) là một công nghệ được sử dụng trong các hệ thống an ninh để phát hiện sự di chuyển hoặc kẻ xâm nhập bằng cách nhận ra ánh sáng phát ra từ các vật thể gần đó. PIR là kết quả của nhiều năm đổi mới sản phẩm khi các công ty bảo mật tìm ra những cách mới và sáng tạo để phát hiện sự hiện diện của những kẻ xâm nhập trong các cơ sở thương mại và trong nước.
Trong những năm qua, các cảm biến và máy ảnh Pir đã được chứng minh là một trong những cách thành công nhất để phát hiện hiệu quả những kẻ xâm nhập, tuy nhiên, chúng’Re không phải không có sai sót của họ. Vậy chính xác thì cảm biến Pir là gì? Và điều gì về chúng khiến họ rất hiệu quả?
Nội dung trốn
Cảm biến Pir hoạt động như thế nào?
Bức xạ được tạo ra bởi tất cả các đối tượng có nhiệt độ lớn hơn số không tuyệt đối. Năng lượng này được thể hiện dưới dạng năng lượng nhiệt. Bởi vì nhiệt tỏa ra những bước sóng hồng ngoại, phần lớn bức xạ này không thể nhìn thấy đối với mắt người, tuy nhiên nó có thể được phát hiện bởi các dụng cụ điện tử đã được xây dựng cụ thể cho mục đích này.
Một cảm biến hồng ngoại thụ động phát hiện ánh sáng hồng ngoại phát ra từ một vật thể ấm bằng công nghệ hồng ngoại thụ động.
Trong bối cảnh các cảm biến PIR trong báo động trộm, công nghệ này được kết hợp với một rơle – một thành phần mạch đi qua hai liên hệ – để kích hoạt báo động. Khi cảm biến PIR cảm nhận chuyển động, nó sẽ kích hoạt rơle, làm gián đoạn mạch và khiến báo thức phát ra âm thanh.
Các cảm biến Pir, ở cấp độ cơ bản nhất của chúng, hoạt động bằng cách phát hiện sự thay đổi khác biệt tích cực. Hai vị trí nhạy cảm với hồng ngoại được đặt ở phía trước ống kính và phạm vi phát hiện được xác định bởi các khe cắm’ lĩnh vực của “tầm nhìn”. Trong khi cả hai khe là ‘nhàn rỗi’, Lượng hồng ngoại xung quanh được cảm nhận trong phòng (được phát ra một cách tự nhiên bởi tất cả các mặt hàng) là giống nhau trên cả hai khe trong khi chúng ‘tích cực’. Khi một vật thể, người hoặc động vật di chuyển qua vùng phát hiện, nó được cảm nhận bởi một trong các khe trước mặt kia, tạo ra một sự thay đổi khác biệt tích cực khi nó đi qua và thay đổi khác biệt tiêu cực khi nó thoát ra.
Khi cảm biến PIR phát hiện chuyển động, cảnh báo được gửi đến bảng báo động kích hoạt báo thức. Điều quan trọng là phải đóng hoàn toàn cảm biến PIR với một vật liệu có thể làm giảm ảnh hưởng của nhiệt độ và độ ẩm bên ngoài, chẳng hạn như kim loại như silicon.
Những lợi ích của Pir
Cảm biến chuyển động PIR có thể có nhiều lợi ích trong môi trường thương mại và dân cư. Máy ảnh Pir thường được so sánh với máy ảnh cảm biến chuyển động, nhưng Pir có lợi ích mạnh mẽ so với phát hiện chuyển động tiêu chuẩn – việc giảm báo động sai. Camera phát hiện chuyển động không thể phân biệt giữa chuyển động của lá và một kẻ xâm nhập của con người chẳng hạn vì chúng chỉ đơn giản phát hiện tất cả các loại chuyển động. PIR chỉ phát hiện thay đổi nhiệt, dẫn đến các tác nhân đáng tin cậy hơn, các yếu tố kích hoạt sai phổ biến như lỗi, chuyển động gió, lá, vv aren’t nhận – tiết kiệm thời gian và tiền bạc của bạn cho chi phí giám sát.
Cách sử dụng chính của máy ảnh PIR trong môi trường thương mại hoặc công trường xây dựng là hỗ trợ bảo vệ không gian trống. Mặc dù báo động không chính xác là một công nghệ phòng ngừa, chúng có thể được sử dụng để kích hoạt phản ứng nên những kẻ xâm nhập vi phạm các biện pháp bảo mật ban đầu của bạn. Công nghệ PIR có thể được cài đặt tại các vị trí chiến lược sau đây để phát hiện khách truy cập không mong muốn:
- Cửa sau, lối vào và điểm truy cập
- Những nơi mù hoặc ẩn gần cảnh quan
- Gần cửa sổ
- Trang web chu vi và bãi đỗ xe
Làm thế nào bạn có thể giảm báo động sai với PIR (và máy dò chuyển động tiêu chuẩn)?
Các cảm biến Pir rất tốt trong việc xác định xem bạn có kẻ xâm nhập hay nó’s chỉ là một con vật chẳng hạn. Họ có mức độ chính xác tốt hơn và có thể giảm báo động sai về tổng thể. Tuy nhiên, bạn nên chú ý đến một số chi tiết nhỏ để tiếp tục giảm nguy cơ báo động sai từ các cảm biến chuyển động PIR của bạn.
Nhiều báo động sai sẽ được gây ra bởi vị trí của báo thức và cảm biến thay vì chi phí hoặc chất lượng của báo thức. Điều này có nghĩa là khi cài đặt báo động máy dò chuyển động không dây, bạn nên sắp xếp chúng ở những nơi tối đa hóa hiệu quả của chúng trong khi giảm thiểu các cảnh báo sai.
Những điều đơn giản như thổi không khí gần hoặc một loài gặm nhấm di chuyển trên sàn vẫn có thể đặt ra báo thức của bạn.
Kiểm tra vị trí báo thức của bạn được thực hiện tốt nhất sau khi báo động sai xảy ra. Sự bất ngờ trong thiết bị và nhiễu tần số vô tuyến cũng có thể tạo ra các báo động sai. Đầu tiên, loại trừ bất kỳ vấn đề nào trong số này. Nếu nghi ngờ, hãy kiểm tra vị trí của máy ảnh. Kiểm tra khu vực xung quanh máy dò chuyển động để xem liệu nó có gây báo động ngẫu nhiên không.
Máy ảnh Pir đang hoạt động

Clearway sử dụng công nghệ PIR, bao gồm trong Tháp CCTV của chúng tôi được thiết lập. Máy ảnh tháp CCTV của chúng tôi là một giải pháp hiệu quả để giám sát không gian ngoài trời rộng – đặc biệt là trong các công trường xây dựng, khu vực trống lớn và bãi đậu xe. Như bạn’sẽ thấy từ sơ đồ, tháp CCTV Inview của chúng tôi có thể kết nối tối đa 8 cảm biến PIR không dây, từ xa, được gắn tới 100m từ tháp.
Khi một PIR được kích hoạt bởi một kẻ xâm nhập, một thử thách âm thanh trực tiếp có thể được sử dụng từ trạm giám sát để liên lạc với những kẻ xâm nhập. Khi phát hiện, mỗi Pir sẽ hướng dẫn Tháp’camer camer để xoay, phóng to và tập trung vào nguyên nhân kích hoạt. Tháp CCTV của chúng tôi được cung cấp nguồn chính với pin dự phòng tích phân 24 giờ để cung cấp quyền truy cập, ghi và truy cập từ xa liên tục.
nếu bạn’RE đang tìm cách đảm bảo tài sản của bạn, liên hệ với một trong những chuyên gia của chúng tôi ngay hôm nay 0800 085 8695 và tìm hiểu thêm về khả năng bảo mật PIR và rộng hơn của chúng tôi.